![]()
L’influenza della distribuzione a priori#
Il dibattito tra approcci bayesiani e frequentisti nella statistica ha avuto un impatto significativo su molteplici discipline, dalla psicologia alla scienza dei dati. Mentre i metodi frequentisti hanno dominato il panorama scientifico per decenni, l’approccio bayesiano sta guadagnando sempre più terreno, grazie alla sua capacità di incorporare conoscenza esperta e credenze preesistenti nel modello statistico. In questo contesto, questo capitolo si focalizza sull’importanza e sulle implicazioni della soggettività intrinseca nella scelta dei priori durante il processo di aggiornamento bayesiano. Esploreremo come questa soggettività possa influenzare le conclusioni derivate da analisi bayesiane e come possa essere mitigata o valorizzata attraverso metodologie rigorose.
Per illustrare questi concetti, esamineremo dettagliatamente alcuni esempi, tra cui un caso studio tratto dal libro “Bayes Rules!” di Johnson e collaboratori [JOD22]. Questi esempi ci serviranno come veicolo per comprendere come l’integrazione di informazioni a priori e dati osservati avviene in pratica, e come essa possa portare a inferenze più robuste e ben informate.
L’obiettivo del capitolo è quindi fornire una panoramica accessibile delle sfide e delle potenzialità inerenti all’uso dei priori nell’approccio bayesiano, al fine di migliorare la comprensione del suo ruolo crescente nel panorama scientifico attuale.
Preparazione del Notebook#
Show code cell source
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
from scipy import integrate, stats
import pymc as pm
import pymc.sampling_jax
import requests
import arviz as az
from scipy.stats import norm, t
import warnings
warnings.filterwarnings("ignore", category=UserWarning)
warnings.filterwarnings("ignore", category=FutureWarning)
warnings.filterwarnings("ignore", category=Warning)
/Users/corrado/opt/anaconda3/envs/pymc_env/lib/python3.11/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
Show code cell source
%config InlineBackend.figure_format = 'retina'
RANDOM_SEED = 42
rng = np.random.default_rng(RANDOM_SEED)
az.style.use("arviz-darkgrid")
sns.set_theme(palette="colorblind")
Il caso beta-binomiale#
La formula \( p(\theta \mid y) \propto p(\theta) \times p(y \mid \theta) \) è fondamentale per la comprensione dell’inferenza bayesiana. Essa illustra chiaramente che la distribuzione a posteriori emerge dalla congiunzione tra la distribuzione a priori e la funzione di verosimiglianza associata ai dati osservati. Questa sinergia permette di integrare informazioni a priori con evidenze empiriche recenti, risultando in una stima a posteriori del parametro \( \theta \) che è caratterizzata da un elevato grado di precisione e informatività.
Nel corso di questo capitolo, faremo uso di due funzioni specifiche per esplorare il modello beta-binomiale: plot_beta_binomial e summarize_beta_binomial. La prima funzione permette di visualizzare graficamente le distribuzioni a priori, di verosimiglianza e a posteriori, offrendo quindi un quadro intuitivo dell’aggiornamento bayesiano. La seconda funzione, invece, si concentra sull’estrazione di statistiche descrittive come la media, la moda e la varianza dalla distribuzione a posteriori. Entrambe queste risorse provengono dal testo di Johnson et al. [JOD22] e saranno strumentali per una comprensione approfondita del modello in esame.
Show code cell source
def plot_beta_binomial(
alpha, beta, y=None, n=None, prior=True, likelihood=True, posterior=True
) -> None:
"""Plot a Beta-Binomial Bayesian Model
@param alpha,beta positive shape parameters of the prior Beta model
@param y observed number of successes
@param n observed number of trials
@param prior a logical value indicating whether the prior model should be plotted
@param likelihood a logical value indicating whether the scaled likelihood should be plotted
@param posterior a logical value indicating whether posterior model should be plotted
"""
if y is None or n is None:
print("Warning: to visualize the posterior specify function parameters y and n")
θ = np.linspace(0, 1, 100)
p_theta_given_y = stats.beta.pdf(θ, alpha, beta)
plt.fill_between(θ, p_theta_given_y, lw=4, color="k", label="prior", alpha=0.2)
alpha_post = alpha + y
beta_post = beta + n - y
p_theta_given_y_post = stats.beta.pdf(θ, alpha_post, beta_post)
plt.fill_between(θ, p_theta_given_y_post, lw=4, color="r", label="posterior", alpha=0.2)
likelihood = stats.binom.pmf(y, n, θ)
scale_factor = integrate.simpson(likelihood, θ)
plt.fill_between(
θ, likelihood / scale_factor, lw=4, color="b", label="likelihood scaled", alpha=0.2
)
plt.xlabel(r"$\pi$")
plt.ylabel("density")
plt.legend()
def summarize_beta_binomial(alpha, beta, y=None, n=None):
"""Summarize a Beta-Binomial Bayesian model
@param alpha,beta positive shape parameters of the prior Beta model
@param y number of successes
@param n number of trials
Return: Pandas dataframe summarizing beta binomial
"""
def beta_mean(a, b):
return a / (a + b)
def beta_mode(a, b):
if a < 1 and b < 1:
return "0 and 1"
elif a <= 1 and b > 1:
return 0
elif a > 1 and b < 1:
return 1
else:
return (a - 1) / (a + b - 2)
def beta_var(a, b):
return a * b / ((a + b) ** 2 * (a + b + 1))
prior_mean = beta_mean(alpha, beta)
prior_mode = beta_mode(alpha, beta)
prior_var = beta_var(alpha, beta)
prior_sd = np.sqrt(prior_var)
if y is None and n is None:
summary = pd.DataFrame(
{
"alpha": alpha,
"beta": beta,
"mean": prior_mean,
"mode": prior_mode,
"var": prior_var,
"sd": prior_sd,
},
index=["prior"],
)
else:
post_alpha = y + alpha
post_beta = n - y + beta
post_mean = beta_mean(post_alpha, post_beta)
post_mode = beta_mode(post_alpha, post_beta)
post_var = beta_var(post_alpha, post_beta)
post_sd = np.sqrt(post_var)
summary = pd.DataFrame(
{
"alpha": [alpha, post_alpha],
"beta": [beta, post_beta],
"mean": [prior_mean, post_mean],
"mode": [prior_mode, post_mode],
"var": [prior_var, post_var],
"sd": [prior_sd, post_sd],
},
index=["prior", "posterior"],
)
return summary
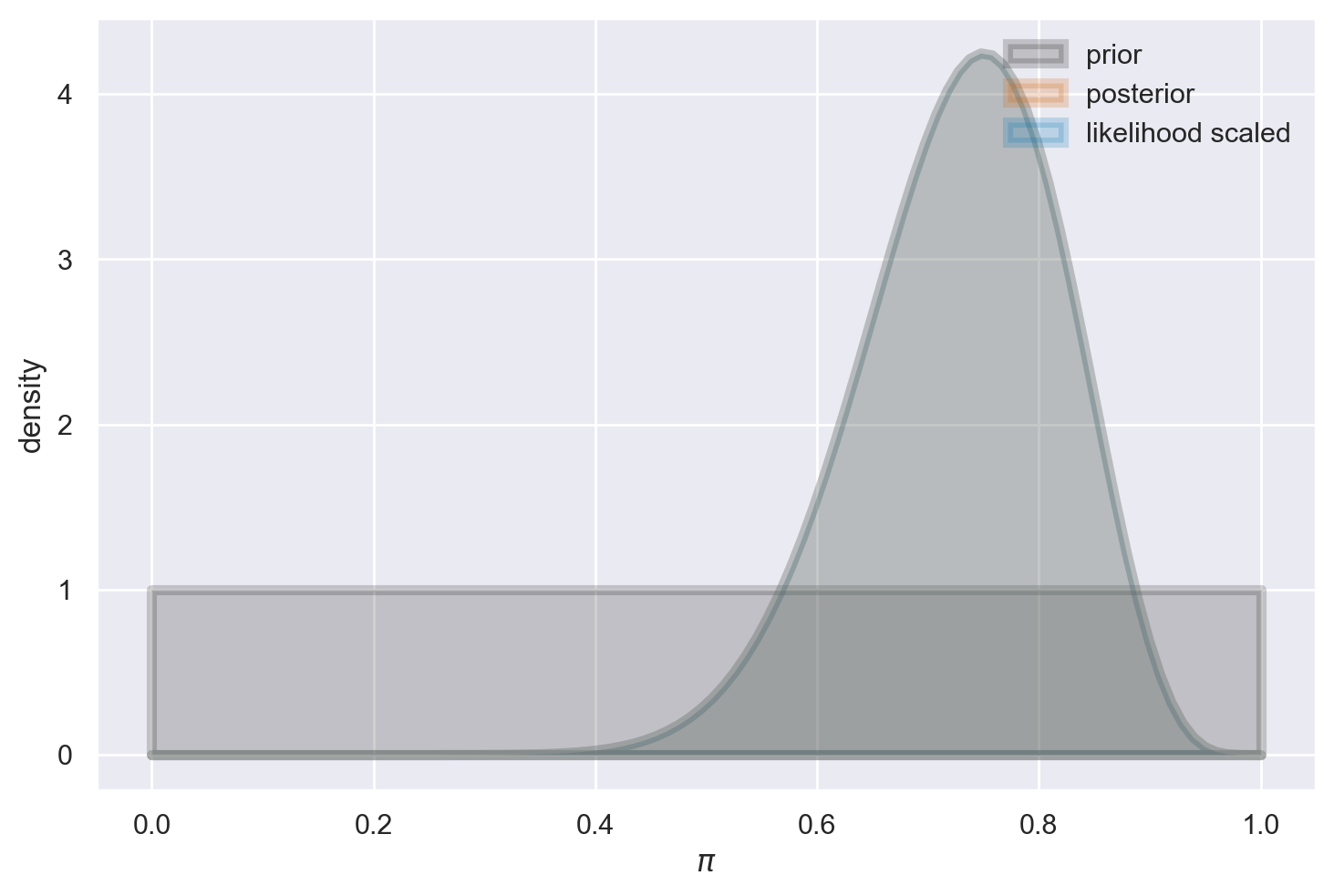
Nel caso in cui disponiamo di un campione di dati di dimensioni molto ridotte, come ad esempio 15 successi su 20 tentativi in una distribuzione beta-binomiale, la distribuzione a priori può esercitare un notevole impatto sulla distribuzione a posteriori. In contrasto, se consideriamo una distribuzione a priori uniforme, la distribuzione a posteriori assomiglierà alla funzione di verosimiglianza, con l’eccezione dell’area sotto le due curve. In parole più semplici, quando la distribuzione a priori è uniforme, la distribuzione a posteriori presenterà un picco nella stima di massima verosimiglianza. Tuttavia, quando adottiamo diverse distribuzioni a priori, la distribuzione a posteriori potrebbe notevolmente discostarsi.
Cominciamo esaminando il caso in cui viene adottata una distribuzione a priori uniforme.
plot_beta_binomial(alpha=1, beta=1, y=15, n=20)
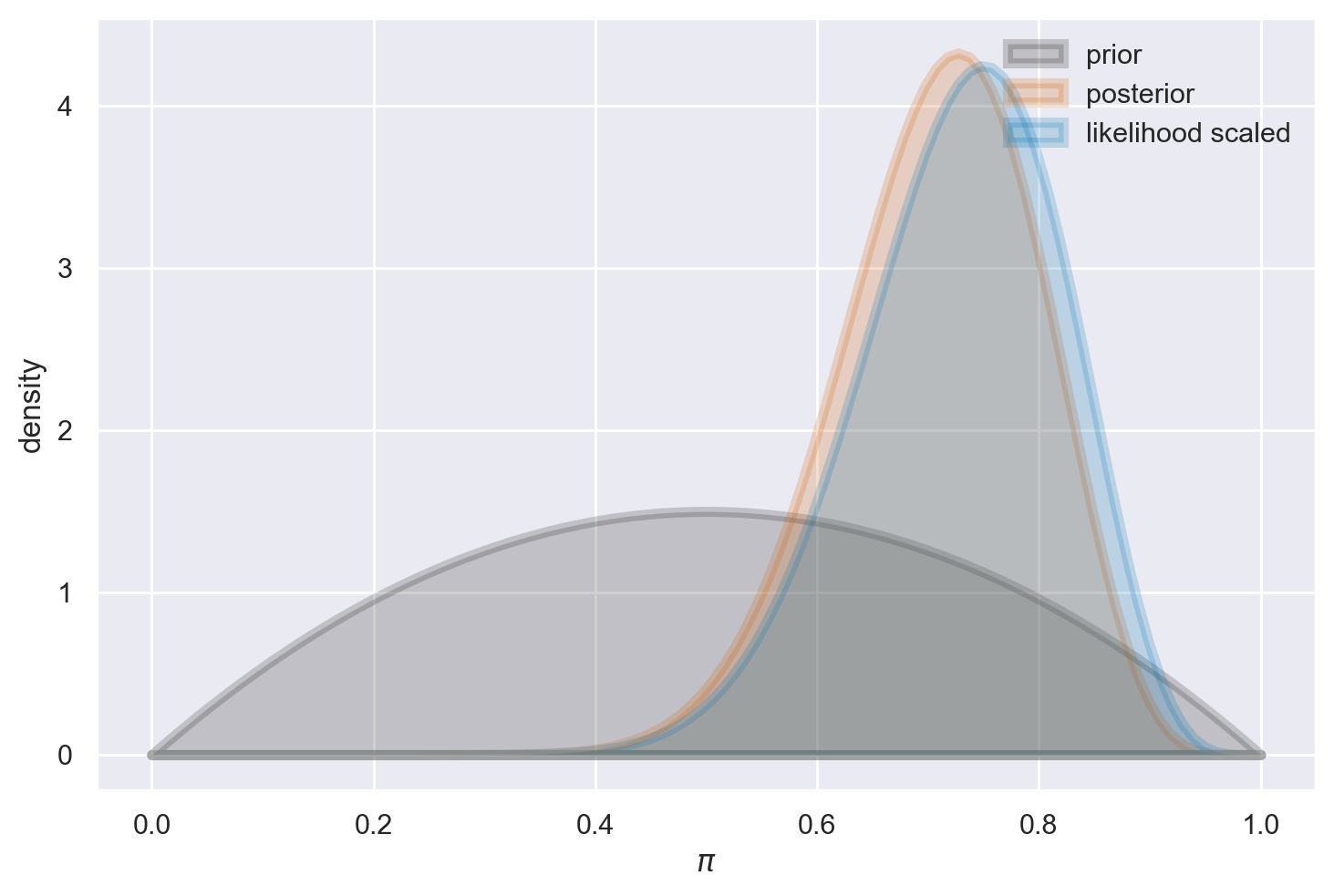
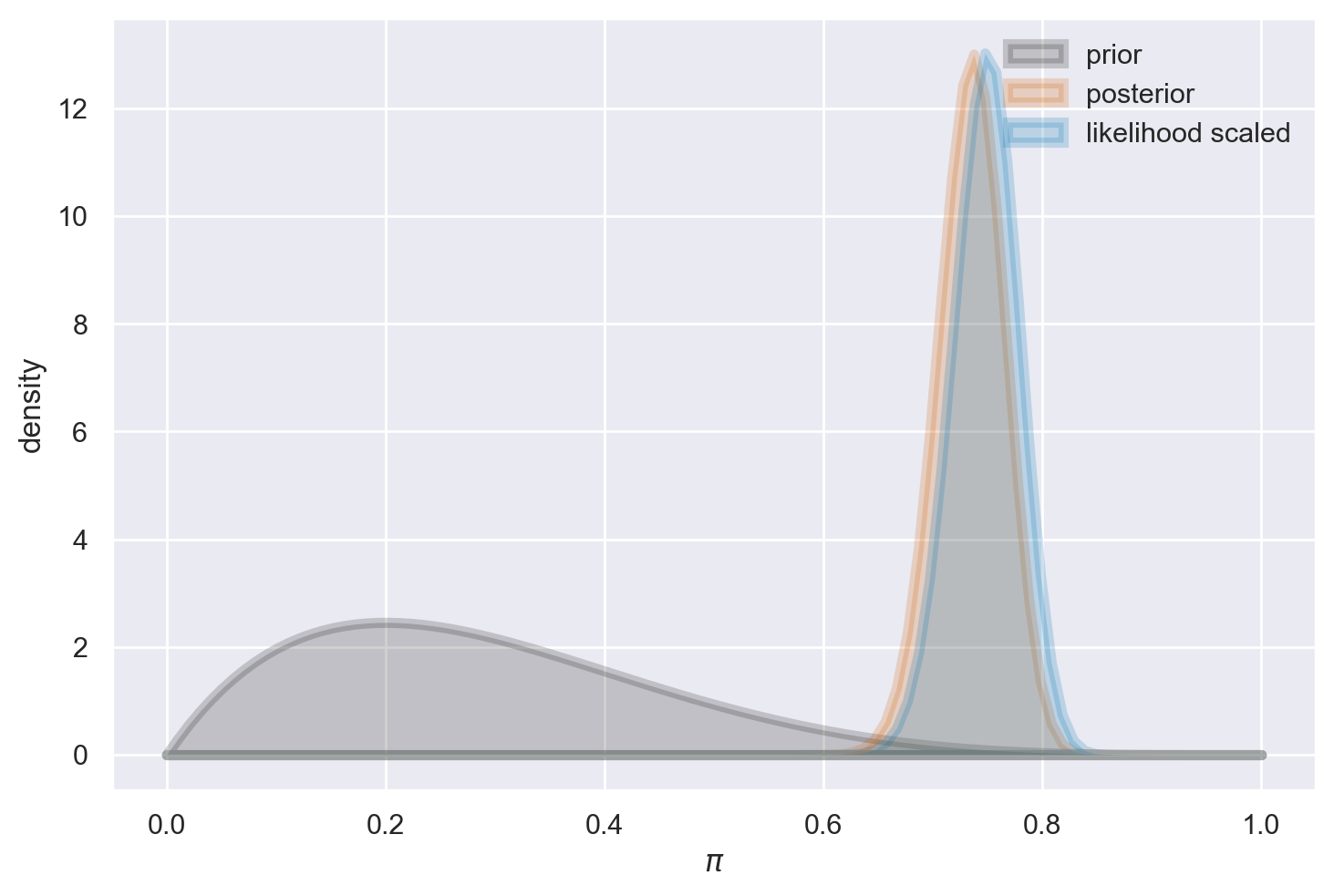
Esaminiamo ora l’effetto di una distribuzione a priori poco informativa, come ad esempio una Beta(2, 2). In questa situazione, l’impatto di tale scelta sulla distribuzione a posteriori è di modesta entità, ma comunque presente. Questo fenomeno può essere interpretato come un effetto di “regolarizzazione”, il quale influisce sulla nostra stima in modo più cauto rispetto a quanto ottenuto tramite il principio di massima verosimiglianza. In altre parole, la stima risultante risulta essere più “bilanciata” verso il valore intermedio di 0.5.
plot_beta_binomial(alpha=2, beta=2, y=15, n=20)
summarize_beta_binomial(alpha=2, beta=2, y=15, n=20)
| alpha | beta | mean | mode | var | sd | |
|---|---|---|---|---|---|---|
| prior | 2 | 2 | 0.500000 | 0.500000 | 0.050000 | 0.223607 |
| posterior | 17 | 7 | 0.708333 | 0.727273 | 0.008264 | 0.090906 |
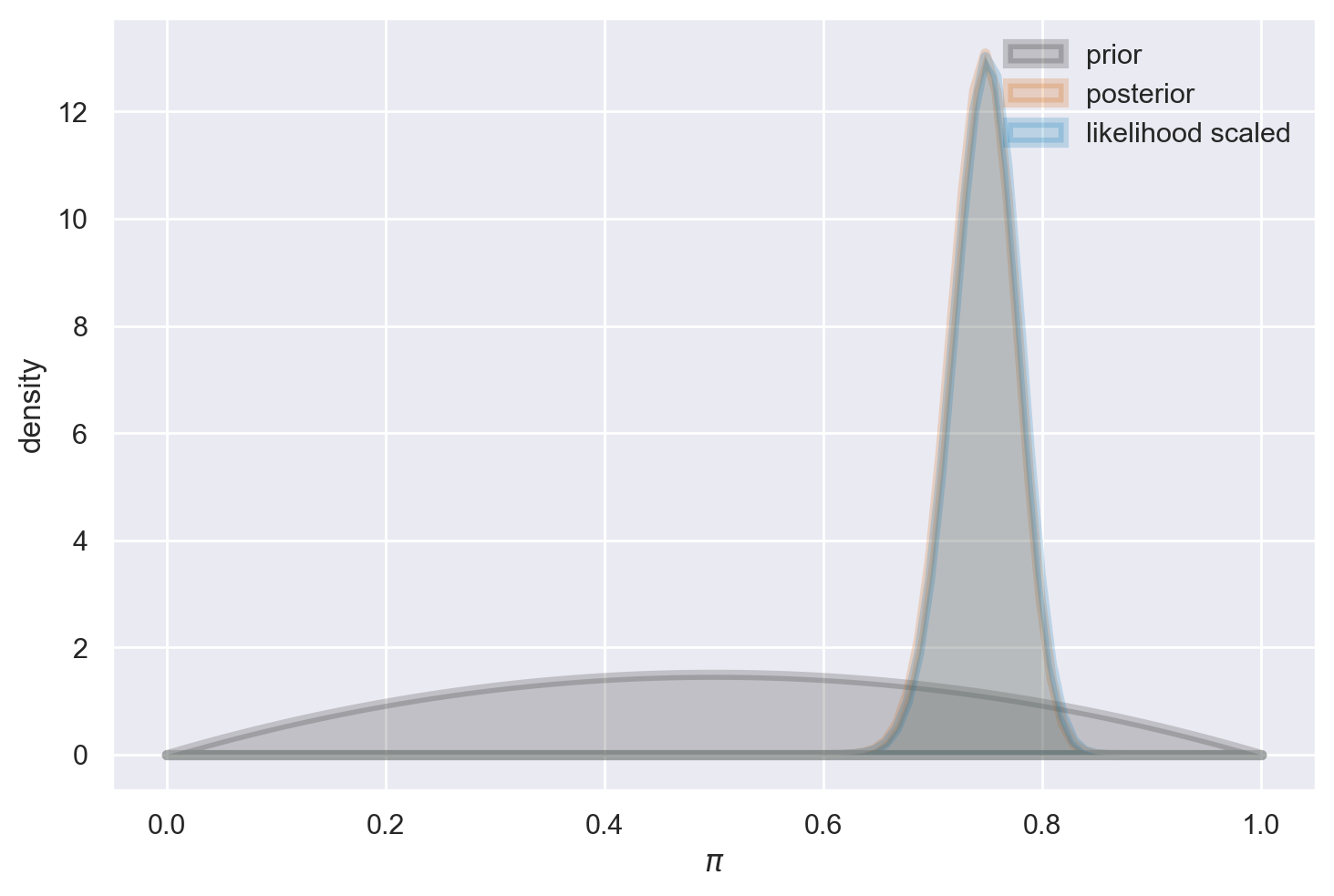
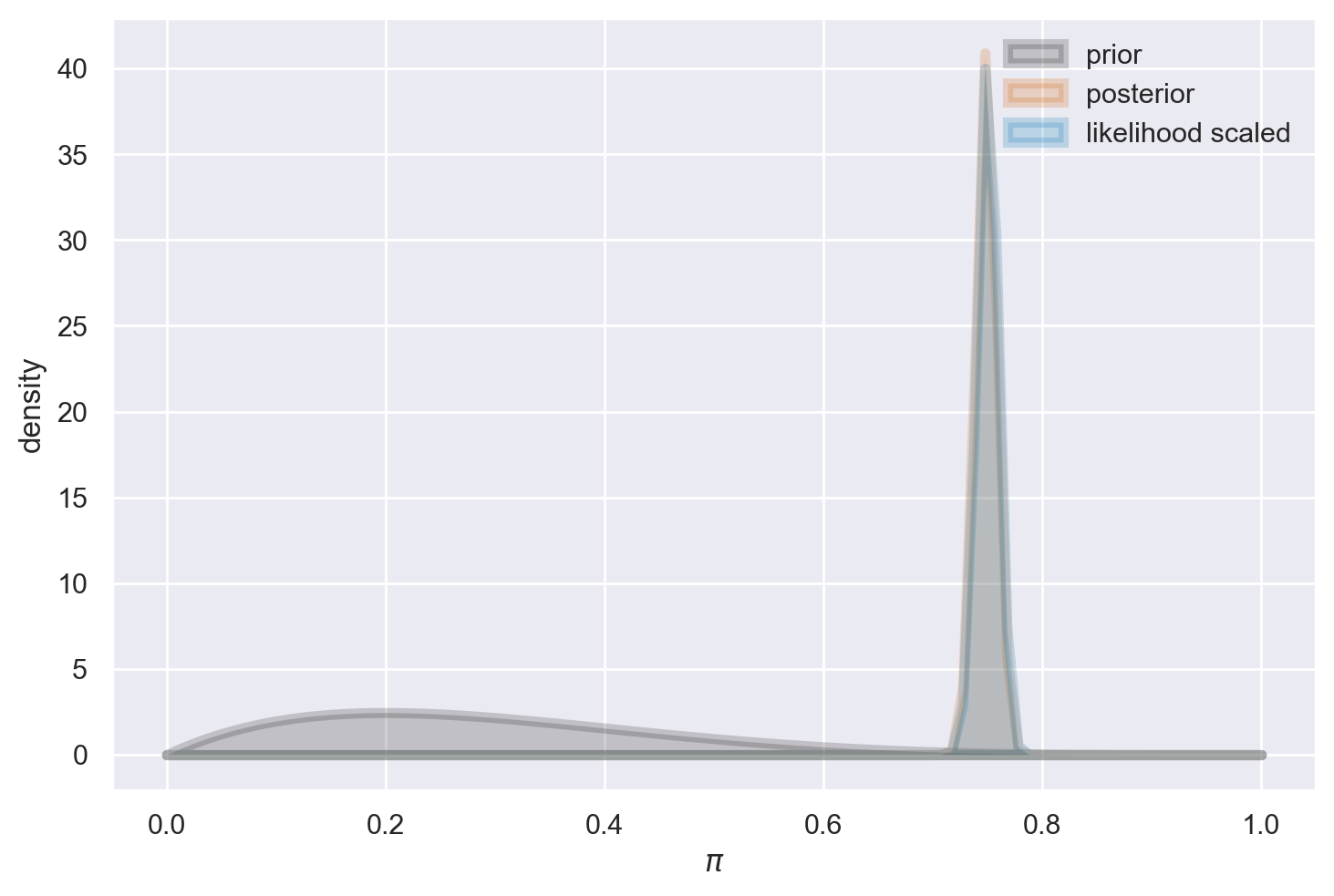
Se il campione è di dimensioni maggiori, l’adozione di una distribuzione a priori Beta(2, 2) ha un effetto trascurabile: infatti, il valore massimo della distribuzione a posteriori risulta essere quasi identico alla stima di massima verosimiglianza.
plot_beta_binomial(alpha=2, beta=2, y=150, n=200)
summarize_beta_binomial(alpha=2, beta=2, y=150, n=200)
| alpha | beta | mean | mode | var | sd | |
|---|---|---|---|---|---|---|
| prior | 2 | 2 | 0.500000 | 0.500000 | 0.050000 | 0.223607 |
| posterior | 152 | 52 | 0.745098 | 0.747525 | 0.000926 | 0.030438 |
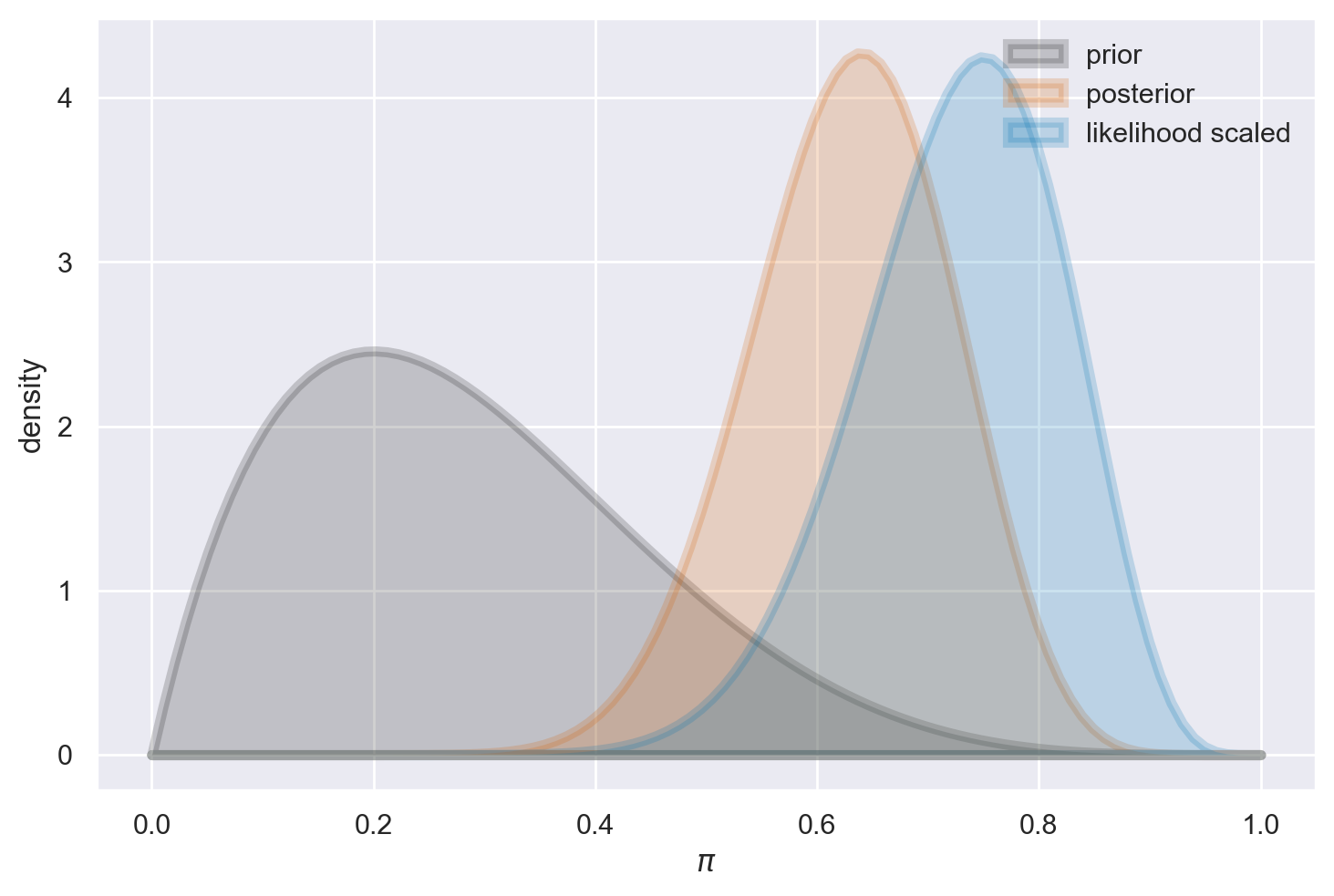
Se optiamo per una distribuzione a priori informativa, questa avrà un notevole impatto sulla distribuzione a posteriori quando ci si trova di fronte a un campione di dimensioni ridotte.
plot_beta_binomial(alpha=2, beta=5, y=15, n=20)
summarize_beta_binomial(alpha=2, beta=5, y=15, n=20)
| alpha | beta | mean | mode | var | sd | |
|---|---|---|---|---|---|---|
| prior | 2 | 5 | 0.285714 | 0.20 | 0.025510 | 0.159719 |
| posterior | 17 | 10 | 0.629630 | 0.64 | 0.008328 | 0.091260 |
Al contrario, la medesima distribuzione a priori ha un effetto insignificante sulla distribuzione a posteriori quando il campione è di dimensioni considerevoli.
plot_beta_binomial(alpha=2, beta=5, y=150, n=200)
summarize_beta_binomial(alpha=2, beta=5, y=150, n=200)
| alpha | beta | mean | mode | var | sd | |
|---|---|---|---|---|---|---|
| prior | 2 | 5 | 0.285714 | 0.200000 | 0.025510 | 0.159719 |
| posterior | 152 | 55 | 0.734300 | 0.736585 | 0.000938 | 0.030627 |
plot_beta_binomial(alpha=2, beta=5, y=1500, n=2000)
summarize_beta_binomial(alpha=2, beta=5, y=1500, n=2000)
| alpha | beta | mean | mode | var | sd | |
|---|---|---|---|---|---|---|
| prior | 2 | 5 | 0.285714 | 0.200000 | 0.025510 | 0.159719 |
| posterior | 1502 | 505 | 0.748381 | 0.748628 | 0.000094 | 0.009684 |
Connessione tra intuizioni e teoria#
L’equilibrio tra la distribuzione a priori e le evidenze provenienti dai dati, come dimostrato negli esempi precedenti, non solo rispecchia le nostre intuizioni, ma rappresenta anche una necessità matematica. Questo concetto diventa chiaro esaminando la formula del valore atteso della distribuzione a posteriori nel contesto del caso beta-binomiale, che può essere riscritta come segue:
L’equazione precedente rivela che il valore atteso a posteriori si ottiene come una media ponderata tra il valore atteso a priori \(\left( \frac{\alpha}{\alpha+\beta}\right)\) e la proporzione osservata dei successi \(\left(\frac{y}{n}\right)\). I pesi sono dati da \(\left( \frac{\alpha+\beta}{\alpha+\beta+n}\right)\) e \(\left( \frac{n}{\alpha+\beta+n}\right)\). Pertanto, quando il numero di osservazioni \(n\) è significativo rispetto alla somma dei parametri \(\alpha + \beta\), la distribuzione a posteriori sarà principalmente influenzata dai dati osservati e in minor misura dalle credenze a priori. Al contrario, se \(n\) è piccolo rispetto a \(\alpha + \beta\), i dati avranno un peso inferiore rispetto alle credenze a priori.
Queste considerazioni indicano come scegliere i parametri \(\alpha\) e \(\beta\): se desideriamo rappresentare una totale ignoranza sul fenomeno, una scelta coerente è \(\alpha = \beta = 1\) (attribuiamo uguale credibilità a ogni valore di \(\theta\)). Se, invece, possediamo forti credenze a priori, possiamo selezionare \(\alpha\) in modo da eguagliare il valore atteso a priori, mentre \(\alpha + \beta\) rifletterà l’importanza attribuita all’informazione a priori: maggiore è il valore di \(\alpha + \beta\), maggiore sarà il numero di dati necessari per influenzare significativamente la distribuzione a posteriori rispetto a quella a priori. In situazioni in cui \(n\) è considerevolmente grande, la distribuzione a posteriori avrà un impatto ridotto sulla distribuzione a priori, a meno che non si facciano scelte estreme per i parametri a priori.
Un Esempio Controintuitivo#
Esaminiamo ora un altro esempio proposto in un tweet di McElreath:
Lesson: Don’t trust intuition, for even simple prior+likelihood scenarios defy it. Four examples below, each producing radically different posteriors. Can you guess what each does?
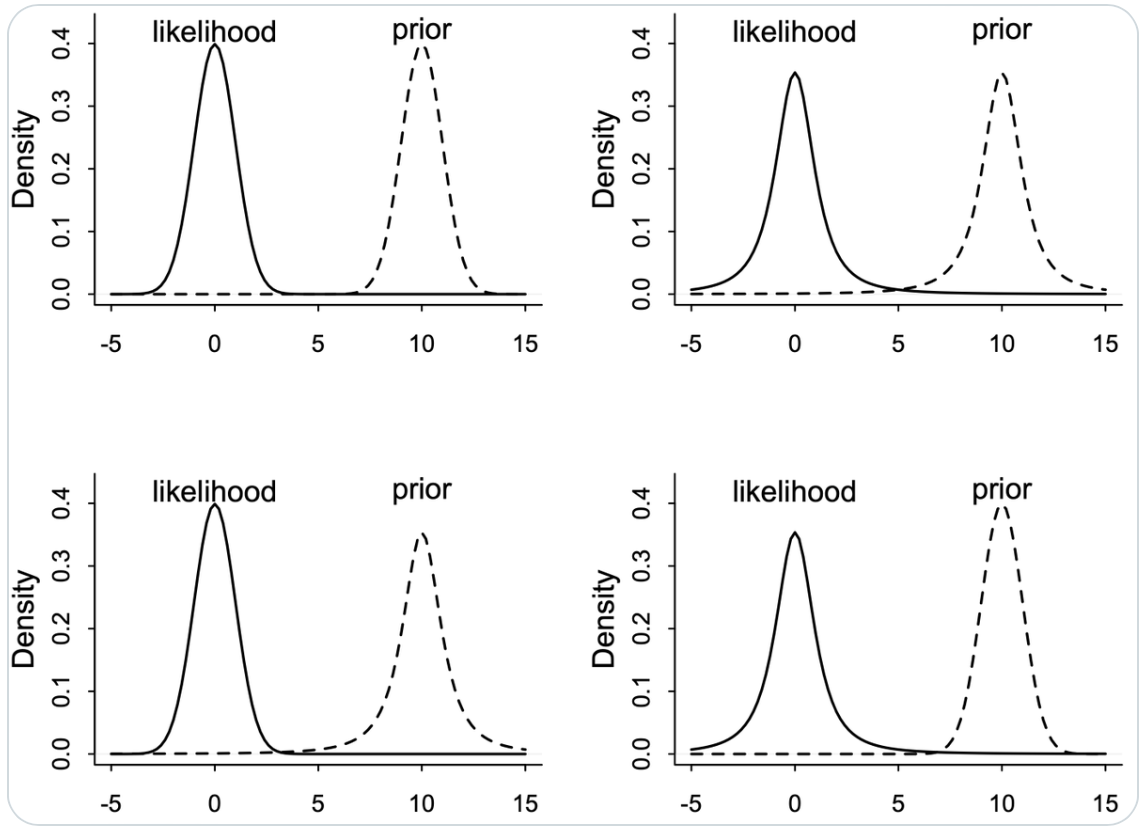
Nella figura successiva vediamo la risposta alla domanda precedente.
McElreath descrive le caratteristiche di quattro diversi scenari in cui si combinano distribuzioni normali (Gaussiane) e Student-t (con 2 gradi di libertà) per il prior e la likelihood. La distribuzione gaussiana ha code molto sottili, mentre quella di Student-t ha code più spesse.
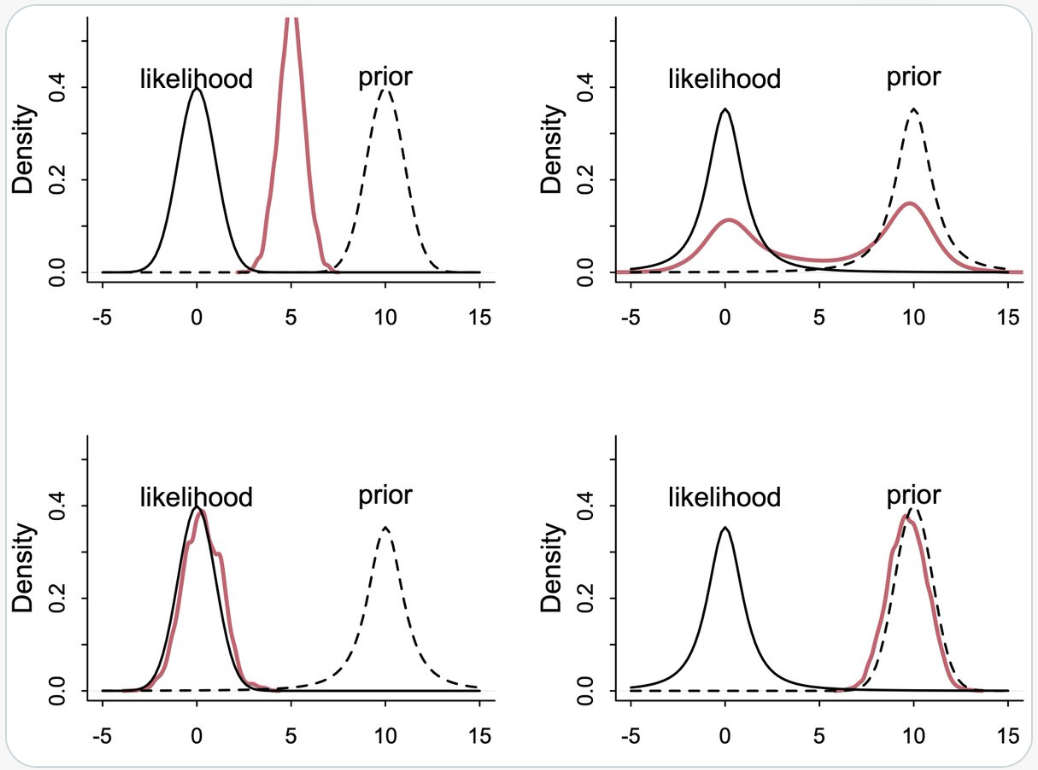
In Alto a Sinistra: Prior Normale, Likelihood Normale
y ~ Normal(mu,1)mu ~ Normal(10,1)In questo scenario classico di aggiornamento bayesiano, il posterior risulta essere un compromesso tra il prior e la likelihood. La distribuzione normale, con le sue code sottili, contribuisce a un aggiornamento più “prevedibile” e concentrato attorno al valore medio.
In Alto a Destra: Prior Student, Likelihood Student (df=2)
y ~ Student(2,mu,1)mu ~ Student(2,10,1)In questo caso, entrambe le distribuzioni hanno code più spesse. La presenza di “extra massa” nelle code significa che ciascuna distribuzione trova il modo dell’altra più plausibile, portando a una media che non rappresenta il miglior “compromesso”. Questo scenario risulta in una maggiore incertezza e un posterior meno definito.
In Basso a Sinistra: Prior Student, Likelihood Normale
y ~ Normal(mu,1)mu ~ Student(2,10,1)Qui, la likelihood normale, con le sue code sottili, tende a dominare. Essa è molto scettica nei confronti del prior con code spesse, ma il prior di Student-t non è sorpreso dalla likelihood. Questo porta a un posterior che è più influenzato dalla likelihood normale.
In Basso a Destra: Prior Normale, Likelihood Student
y ~ Student(2,mu,1)mu ~ Normal(10,1)In questo ultimo scenario, è il prior normale a dominare. Il ragionamento è simile a quello del caso precedente, ma in senso inverso. Il prior normale, con le sue code sottili, impone una maggiore influenza sul posterior, rendendolo meno influenzato dalle code più spesse della likelihood di Student-t.
In sintesi, la combinazione di queste due distribuzioni in diversi modi porta a risultati di aggiornamento bayesiano molto differenti, a seconda di quale tra prior e likelihood abbia le code più spesse e quindi eserciti una maggiore influenza sul posterior.
Di seguito è riportato il codice per riprodurre i risultati delle figure precedenti.
# Observed data
yobs = 0
# Number of samples
n_samples = 2000
# Model with normal prior and normal likelihood
with pm.Model() as mnn:
mu = pm.Normal('mu', mu=10, sigma=1)
y = pm.Normal('y', mu=mu, sigma=1, observed=yobs)
trace_mnn = pm.sampling_jax.sample_numpyro_nuts(n_samples, chains=4)
# Model with t prior and t likelihood
with pm.Model() as mtt:
mu = pm.StudentT('mu', nu=2, mu=10, sigma=1)
y = pm.StudentT('y', nu=2, mu=mu, sigma=1, observed=yobs)
trace_mtt = pm.sampling_jax.sample_numpyro_nuts(n_samples, chains=4)
# Model with t prior and normal likelihood
with pm.Model() as mnt:
mu = pm.StudentT('mu', nu=2, mu=10, sigma=1)
y = pm.Normal('y', mu=mu, sigma=1, observed=yobs)
trace_mnt = pm.sampling_jax.sample_numpyro_nuts(n_samples, chains=4)
# Model with normal prior and t likelihood
with pm.Model() as mtn:
mu = pm.Normal('mu', mu=10, sigma=1)
y = pm.StudentT('y', nu=2, mu=mu, sigma=1, observed=yobs)
trace_mtn = pm.sampling_jax.sample_numpyro_nuts(n_samples, chains=4)
Show code cell output
Compiling...
Compilation time = 0:00:00.777184
Sampling...
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
Running chain 2: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 1: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 3: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 0: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 0: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1787.44it/s]
Running chain 1: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1789.62it/s]
Running chain 2: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1791.79it/s]
Running chain 3: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1793.79it/s]
Sampling time = 0:00:02.184222
Transforming variables...
Transformation time = 0:00:00.086158
Compiling...
Compilation time = 0:00:00.448356
Sampling...
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
Running chain 1: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 2: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 0: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 3: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 0: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1821.97it/s]
Running chain 1: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1823.33it/s]
Running chain 2: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1825.13it/s]
Running chain 3: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1828.10it/s]
Sampling time = 0:00:01.705661
Transforming variables...
Transformation time = 0:00:00.042612
Compiling...
Compilation time = 0:00:00.358342
Sampling...
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
Running chain 3: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 2: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 1: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 0: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 0: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1981.74it/s]
Running chain 1: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1983.07it/s]
Running chain 2: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1985.11it/s]
Running chain 3: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1986.89it/s]
Sampling time = 0:00:01.571776
Transforming variables...
Transformation time = 0:00:00.042813
Compiling...
Compilation time = 0:00:00.358433
Sampling...
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
0%| | 0/3000 [00:00<?, ?it/s]
Compiling.. : 0%| | 0/3000 [00:00<?, ?it/s]
Running chain 1: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 0: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 3: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 2: 0%| | 0/3000 [00:01<?, ?it/s]
Running chain 0: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1989.83it/s]
Running chain 1: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1991.27it/s]
Running chain 2: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1993.36it/s]
Running chain 3: 100%|████████████████████████████████████████████████████| 3000/3000 [00:01<00:00, 1995.27it/s]
Sampling time = 0:00:01.565045
Transforming variables...
Transformation time = 0:00:00.042837
# Function to plot the results
def plot_posterior(trace, model_name):
mu_samples = trace.posterior['mu'].values.flatten() # Extracting 'mu' samples
plt.hist(mu_samples, density=True, bins=30, alpha=0.7, label=f'{model_name} Posterior')
plt.xlabel('mu')
plt.ylabel('Density')
plt.legend()
# Plotting the results
plt.figure(figsize=(9, 7))
plt.subplot(2, 2, 1)
plot_posterior(trace_mnn, 'Normal Prior, Normal Likelihood')
plt.subplot(2, 2, 2)
plot_posterior(trace_mtt, 't Prior, t Likelihood')
plt.subplot(2, 2, 3)
plot_posterior(trace_mnt, 't Prior, Normal Likelihood')
plt.subplot(2, 2, 4)
plot_posterior(trace_mtn, 'Normal Prior, t Likelihood')
plt.tight_layout()
plt.show()
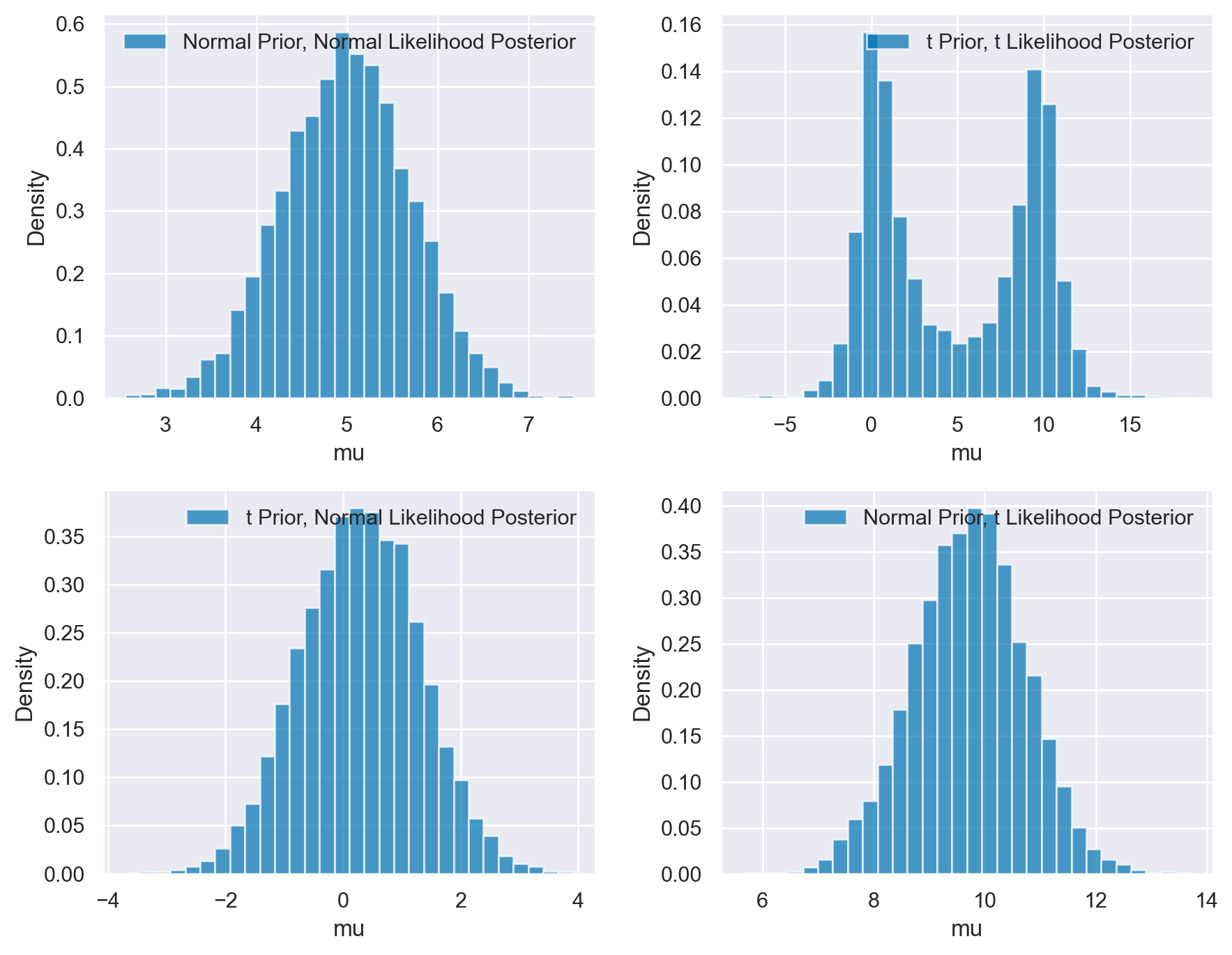
In conclusione, ad eccezione del caso gaussiano, i risultati non sono affatto intuitivi. Pertanto, in contesti come questi, affidarsi esclusivamente alle proprie intuizioni non è una scelta consigliabile. È invece fondamentale procedere con l’esecuzione dei calcoli.
Commenti e considerazioni finali#
La conclusione dell’esempio presentato da Johnson (2022) ci offre una panoramica intuitiva ma fondamentale: l’aggiornamento bayesiano rispecchia i processi di ragionamento che intuitivamente utilizziamo nel quotidiano. Quando ci troviamo di fronte a nuove evidenze deboli, le nostre credenze preesistenti rimangono invariate. Al contrario, evidenze robuste ci costringono a rivedere e aggiornare le nostre credenze in linea con i nuovi dati. Questa è la quintessenza dell’approccio bayesiano: un meccanismo quantitativo e preciso che formalizza le nostre intuizioni.
Questo è in netto contrasto con l’approccio frequentista, che ignora le credenze o le conoscenze preesistenti. In questo schema, i risultati di un test statistico basato su un campione limitato di dati possono portare a una modifica delle credenze senza alcuna considerazione per le evidenze o le intuizioni pregresse. Questo divario metodologico tra i due approcci è sintetizzata con efficacia nella celebre striscia comica di xkcd.
Entrando nel dettaglio del contesto bayesiano, la scelta delle distribuzioni a priori è un elemento cruciale, con due obiettivi principali. In primo luogo, l’utilizzo di distribuzioni a priori debolmente informative agisce come un meccanismo di regolarizzazione, contribuendo a ottenere inferenze più prudenti mitigando l’effetto di osservazioni estreme. Questo aspetto è generalmente accettato e ritenuto non controverso nel campo statistico.
In secondo luogo, un settore in rapida crescita e di grande interesse è l’integrazione esplicita di conoscenza esperta preesistente. Tale processo, noto come ‘elicitazione della conoscenza esperta’ (expert knowledge elicitation) [BLOHaganP19], va ben oltre la semplice intervista con gli esperti. Esso richiede un elevato grado di rigore metodologico per prevenire l’insorgenza di bias cognitivi. Questo aspetto è particolarmente rilevante in ambiti come la psicologia, dove gli sviluppi teorici possono essere meno frequenti. Tale necessità è supportata da un’ampia letteratura accademica e da protocolli ben definiti, quali Cooke, SHELF e Delphi probabilistico [OHagan19].
In conclusione, pur aspirando all’obiettività come ideale della ricerca scientifica, è indispensabile riconoscere e affrontare la soggettività intrinseca nel processo di scelta dei priori. Attraverso l’uso di protocolli rigorosi di elicitazione della conoscenza esperta, è possibile realizzare analisi bayesiane robuste e ben informate, che riflettano in modo accurato sia le incertezze intrinseche che la competenza specifica nel campo di studio.
%load_ext watermark
%watermark -n -u -v -iv -w
Last updated: Sun Jan 28 2024
Python implementation: CPython
Python version : 3.11.7
IPython version : 8.19.0
seaborn : 0.13.0
requests : 2.31.0
numpy : 1.26.2
pandas : 2.1.4
pymc : 5.10.3
arviz : 0.17.0
scipy : 1.11.4
matplotlib: 3.8.2
Watermark: 2.4.3